What even is Diffusion?
Diffusion models approach generative modeling by mapping out probability distributions in high-dimensional spaces. Consider our dataset as a tiny sample from an enormous space of possible images. Our goal is to estimate which regions of this vast space have high probability according to our target distribution.
The core insight of diffusion is that if we add Gaussian noise to an image from our distribution, the resulting noisy image typically becomes less likely to belong to that distribution. This is an empirical observation about human perception - a shoe with a small amount of noise still looks like a shoe, but becomes less recognizable as more noise is added.
By controlling this forward process of adding noise, we create a path from high-probability regions (real images) to a simple distribution we know how to sample from (pure Gaussian noise). The diffusion model then learns the reverse process - how to take a noisy image and predict what the less noisy version would look like. This gives us a powerful way to generate new data. We start with random noise and repeatedly apply our learned denoising function, effectively “hill climbing” toward regions of higher probability in our distribution. At each step, the model pushes the sample toward becoming more like a realistic image from our dataset. Unlike traditional data augmentation where noised examples are treated as equally valid members of a class, diffusion models recognize that noised images are less likely members of the distribution, with their probability decreasing in proportion to the amount of noise added.
The Reparameterization Trick
A key insight that makes diffusion models computationally efficient is the “reparameterization trick.” Instead of having our model predict the clean image directly from a noisy one (which would be challenging), we train it to predict the noise that was added.
This approach has several advantages:
- It’s easier for the model to learn what noise looks like than to directly reconstruct a clean image from a heavily corrupted one
- It allows us to use a simple MSE loss between the predicted noise and the actual noise we added
- It makes the training process more stable since the target (the noise) has a consistent statistical distribution
- It solves the problem of calculating gradients through random noise - by separating the randomness (sampling noise) from the parameters we’re optimizing, we can backpropagate through the model effectively
The reparameterization trick is what allows us to write our forward process in closed form (as we’ll see in Equation 4) and efficiently train our model without having to simulate the entire forward diffusion process at each training step.
Section 2: Background in Denoising Diffusion Probabilistic ModelsEquation 1: Reverse Process
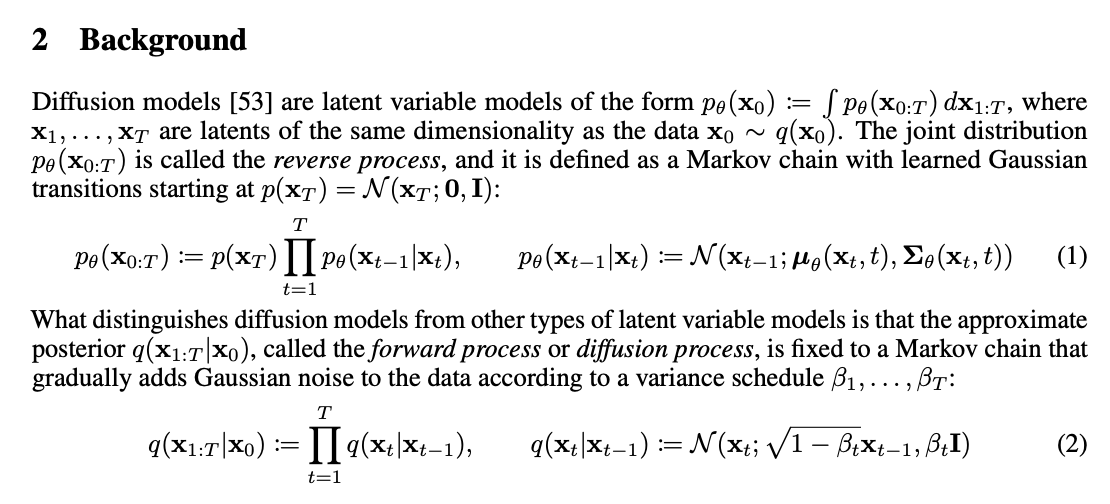
$p$ is a probability density function that represents the reverse process, the process of adding noise.
Let’s start with the notation $p(x_T) = N(x_T; 0, I)$. $N$ is a normal distribution. $0$ is the mean (centered at zero). $I$ is the identity matrix representing the covariance (meaning that elements are independent with unit variance). It describes the distribution of completely random noise, which is the starting point $x_T$.
With that information, we can understand Equation 1. $p_\theta(X_{0:T})$ represents starting with $p(x_T)$ (a standard normal distribution) and continually multiplying other normals distibutions that have the same dimensionality. You can think of it like a blob of proabiltiies iteratively shifting around, approaching the de-noised output.
To implement this in our code, we will be sampling. We will start with a sample from $p_(x_T)$ (a standard normal distribution). Next, we will pass the sample into our model to get the mean and variance terms, and use those terms with define a new Guassian to obtain a new sample $p(x_{t-1})$. We can keep repeating this process until we reach $p(x_0)$, which should look like a real $x_0$.
Equation 2: Forward/Diffusion Process
$q$ is a a probability density function that represents the forward or diffusion process, the process of adding noise. We apply noise in small steps T, where each $\beta_t$ is a scalar that controls the variance of the normal distribution. Since we take the square root of 1 - $\beta_t$, every $\beta_t$ will less than or equal to 1. We implement the variance schedule $\beta_t$ in Variance Schedule.
Just like the *reverse process, the forward process is also a product of Gaussian/normal distributions. Note that every Gaussian is independent of each other. To calculate the distribution $q(x_t)$, we only need $x_{t-1}$ and the $\beta_t$ value corresponding to the step number. All pixels and color channels are noised independently.
Creating dataset
We’ll first generate a dataset of random color gradients for our toy model. We will train the model to be able to recover these gradients from random images by the end of this notebook. Each of these generated images will represents our $x_0$.This should be an easy task for neural networks since the structure of the data is simple.
What is a color gradient?
Color gradients displays the range of possible combinations of two colors, with each of the two colors on opposite corners.
def gradient_images(n_images: int, img_size: tuple[int, int, int]) -> t.Tensor:
"""
Generate n_images of img_size, each being a color gradient.
Args:
n_images: Number of gradient images to generate
img_size: Tuple of (channels, height, width)
Returns:
Tensor of shape (n_images, channels, height, width) containing normalized gradients
"""
C, H, W = img_size
# Keep corners as integers (0-255) like the original
corners = t.randint(0, 255, (2, n_images, C), dtype=t.float32)
# Create coordinate grids
x_coords = t.linspace(0, W / (W + H), W)
y_coords = t.linspace(0, H / (W + H), H)
x, y = t.meshgrid(x_coords, y_coords, indexing="xy")
# Use grid[-1, -1] for normalization exactly as original
grid = x + y
grid = grid / grid[-1, -1]
# Expand dimensions for broadcasting
grid = grid.unsqueeze(0).unsqueeze(0) # shape: 1, 1, H, W
grid = grid.expand(n_images, C, H, W) # shape: n_images, C, H, W
# Calculate gradients using broadcasting but keeping original value ranges
start_colors = corners[0].unsqueeze(-1).unsqueeze(-1) # shape: n_images, C, 1, 1
color_ranges = (corners[1] - corners[0]).unsqueeze(-1).unsqueeze(-1)
# Combine everything and normalize at the end like original
gradients = start_colors + grid * color_ranges
gradients = gradients / 255
assert gradients.shape == (n_images, C, H, W)
return gradients
print("A few samples from the input distribution: ")
img_shape = (3, 16, 16)
n_images = 5
imgs = gradient_images(n_images, img_shape)
plot_images(imgs) # Try running a few times until you understand color gradients
A few samples from the input distribution:

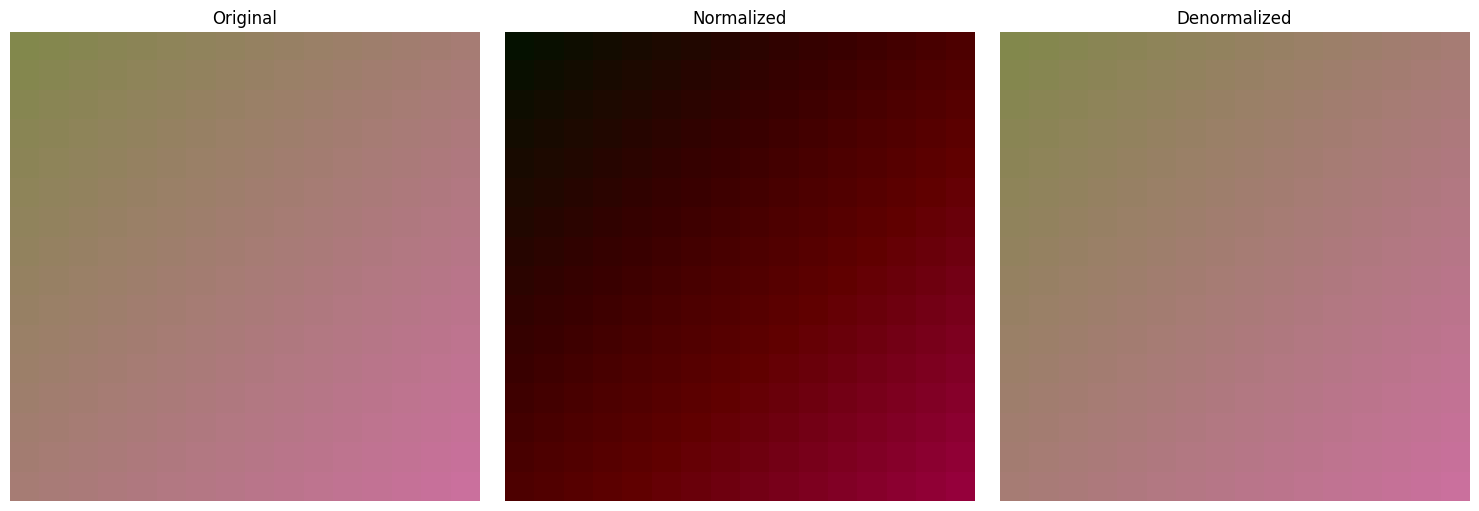
Normalization
For every image, every $(\text{channel} \times \text{height} \times \text{weight})$ has a value between $[0, 1]$, but to help neural networks to learn if we preprocess the data to have a mean of 0. This helps with faster and more stable training, provides better conditions for optimization problems, and reduces the impact of initalization.
All of our model’s inputs will be normalized, but we will denomralize output whenever we want to visualize the results.
def normalize_img(img: t.Tensor) -> t.Tensor:
return img * 2 - 1
def denormalize_img(img: t.Tensor) -> t.Tensor:
return ((img + 1) / 2).clamp(0, 1)
# Normalize/Denormalize the first image from the above section
plot_images(t.stack([imgs[0], normalize_img(imgs)[0], denormalize_img(normalize_img(imgs))[0]]), ["Original", "Normalized", "Denormalized"])
Variance schedule
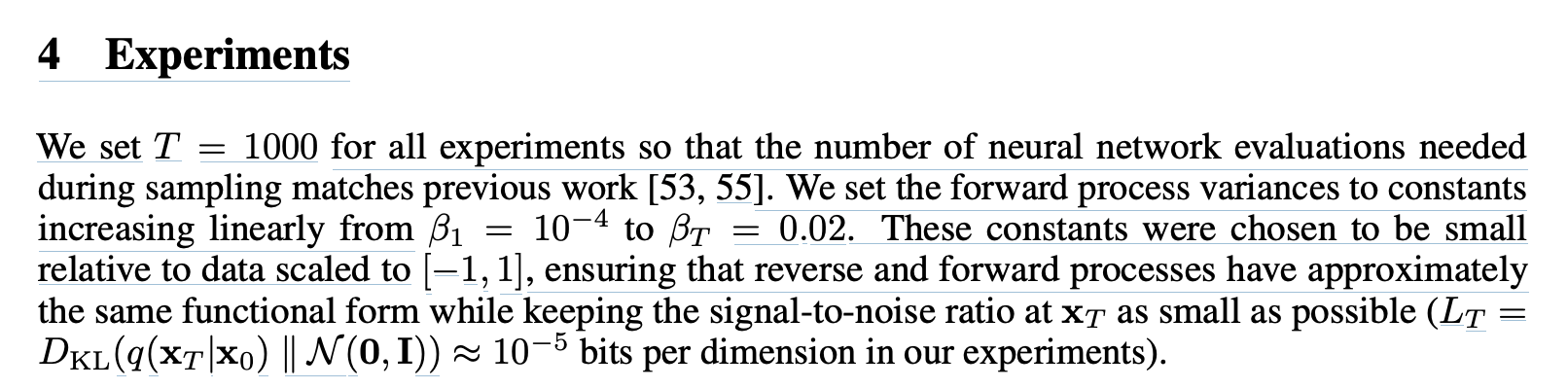
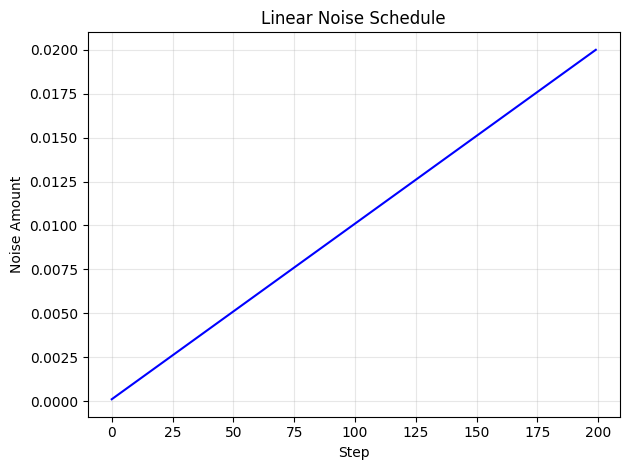
Section 4: Experiments in Denoising Diffusion Probabilistic ModelsIn the paper, the authors linearly scaled the amount of noise, $\beta$, from $10^{-4}$ to $0.02$ in 1000 steps. Since we are training a smaller and simpler dataset, we are going to only be using 200 steps in this notebook for faster training.
def variance_schedule(max_steps: int, min_noise: float = 0.0001, max_noise: float = 0.02) -> t.Tensor:
"""Return the forward process variances as in the paper.
max_steps: total number of steps of noise addition
out: shape (step=max_steps, ) the amount of noise at each step
"""
return t.linspace(min_noise, max_noise, max_steps)
Forward (q) function
Forward (q) function: Equation 2

Section 2: Background - Equation 2 in Denoising Diffusion Probabilistic ModelsCompute the forward function. This function iteratively samples from a normal distribution of the (1) a weighted mean of $x_{t-1}$ and (2) a scheduled varaiance. In early steps $t$, $x_{t-1}$ is heavily waited in the mean and the variance is low. But in later steps $t$, the mean approaches 0 and standard deviation appraches 1.
Remeber that our input is normalized with a mean of 0 and $\beta$ range from $10^{-4}$ to $0.02$
def q_eq2(x: t.Tensor, num_steps: int, betas: t.Tensor) -> t.Tensor:
"""
Add noise to the input image iteratively using a noise schedule.
Args:
x: Input image tensor of shape (channels, height, width)
num_steps: Number of noise iterations to perform
betas: Noise schedule tensor of shape (T,) containing variance values,
where T >= num_steps
Returns:
Noised image tensor of shape (channels, height, width)
"""
for beta in betas[:num_steps]:
x = t.normal(t.sqrt(1 - beta) * x, t.sqrt(beta))
# OR
# x = t.sqrt(1 - beta) * x + t.randn_like(x) * t.sqrt(beta)
return x
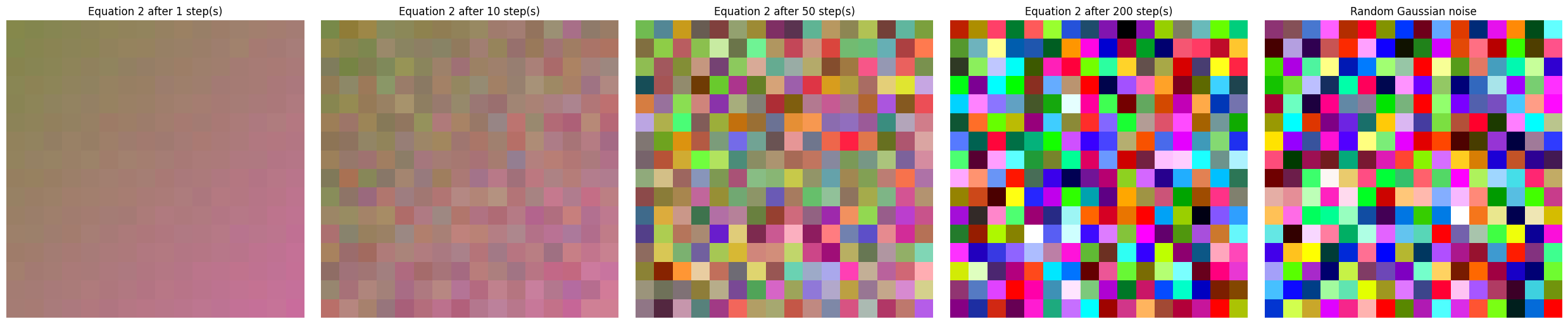
After 50 steps, we can barely make out the colors of the original gradient. After 200 steps, the image looks like random Gaussian noise. As we go from left to right, we start a high signal with most of the image strucutre preserved, but as well continue taking steps, we go from noisy image to pure noise.
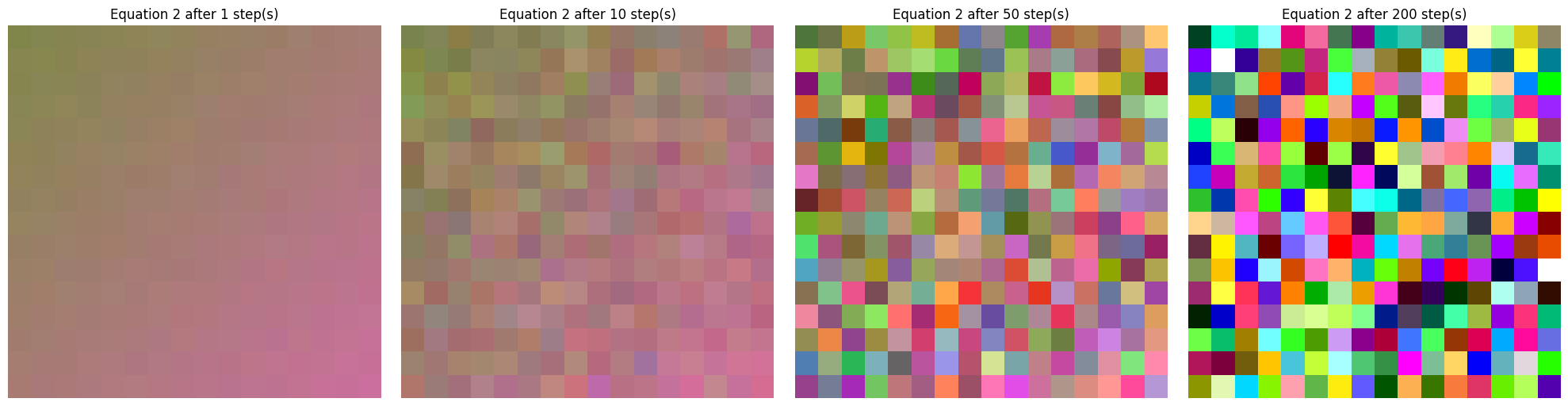
Forward (q) function: Equation 4
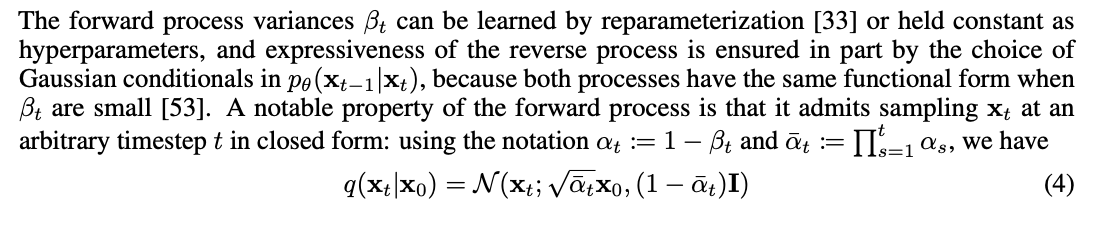
Section 2: Background - Equation 4 in Denoising Diffusion Probabilistic ModelsEquation 2 shows the forward process with a “for loop” that iteratively samples from a Guassian distribution with a weighted mean of the previous image. However, using a “for loop” is computationally expensive.
Equation 4 optimizes Equation 2 by calculating $\alpha$, a closed form notation to directly go to step $t$. The ouputs of Equation 4 should look almost identical to Equation 2.
def q_eq4(x: t.Tensor, num_steps: int, betas: t.Tensor) -> t.Tensor:
"""Equivalent to Equation 2 but without a for loop."""
alphas = 1.0 - betas
alpha_bar = t.prod(alphas[:num_steps])
noise = t.randn_like(x)
return t.sqrt(alpha_bar) * x + t.sqrt(1 - alpha_bar) * noise
Noise Schedule
We will need to remember the noise schedule we used during training (forward equation) for in our reconstruction process. This NoiseSchedule class (nn.Module subclass) will help us pre-compute and store our $\beta$, $\alpha$, and $\bar{\alpha}$ values to use during training and sampling.
class NoiseSchedule(nn.Module):
betas: t.Tensor
alphas: t.Tensor
alpha_bars: t.Tensor
def __init__(
self, max_steps: int, device: Union[t.device, str], min_noise: float = 0.0001, max_noise: float = 0.02
) -> None:
super().__init__()
self.max_steps = max_steps
self.device = device
self.register_buffer("betas", variance_schedule(max_steps, min_noise, max_noise))
alphas = 1 - self.betas
self.register_buffer("alphas", alphas)
alpha_bars = t.cumprod(alphas, dim=-1)
self.register_buffer("alpha_bars", alpha_bars)
self.to(device)
@t.inference_mode()
def beta(self, num_steps: Union[int, t.Tensor]) -> t.Tensor:
"""
Returns the beta(s) corresponding to a given number of noise steps
num_steps: int or int tensor of shape (batch_size,)
Returns a tensor of shape (batch_size,), where batch_size is one if num_steps is an int
"""
return self.betas[num_steps]
@t.inference_mode()
def alpha(self, num_steps: Union[int, t.Tensor]) -> t.Tensor:
"""
Returns the alphas(s) corresponding to a given number of noise steps
num_steps: int or int tensor of shape (batch_size,)
Returns a tensor of shape (batch_size,), where batch_size is one if num_steps is an int
"""
return self.alphas[num_steps]
@t.inference_mode()
def alpha_bar(self, num_steps: Union[int, t.Tensor]) -> t.Tensor:
"""
Returns the alpha_bar(s) corresponding to a given number of noise steps
num_steps: int or int tensor of shape (batch_size,)
Returns a tensor of shape (batch_size,), where batch_size is one if num_steps is an int
"""
return self.alpha_bars[num_steps]
def __len__(self) -> int:
return self.max_steps
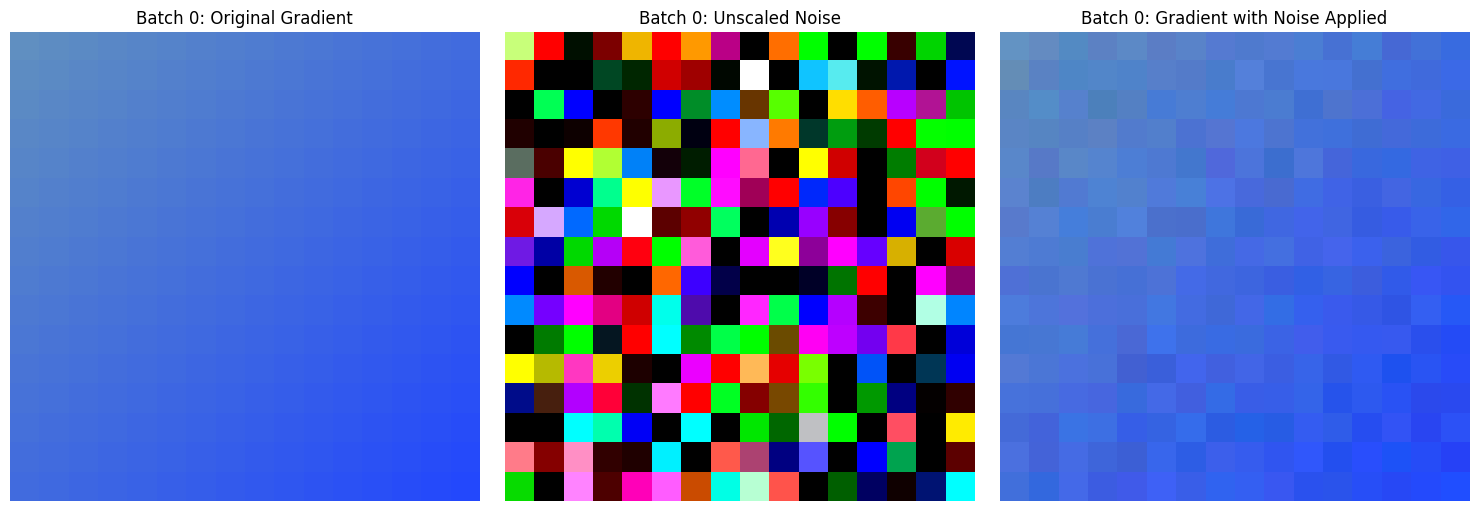
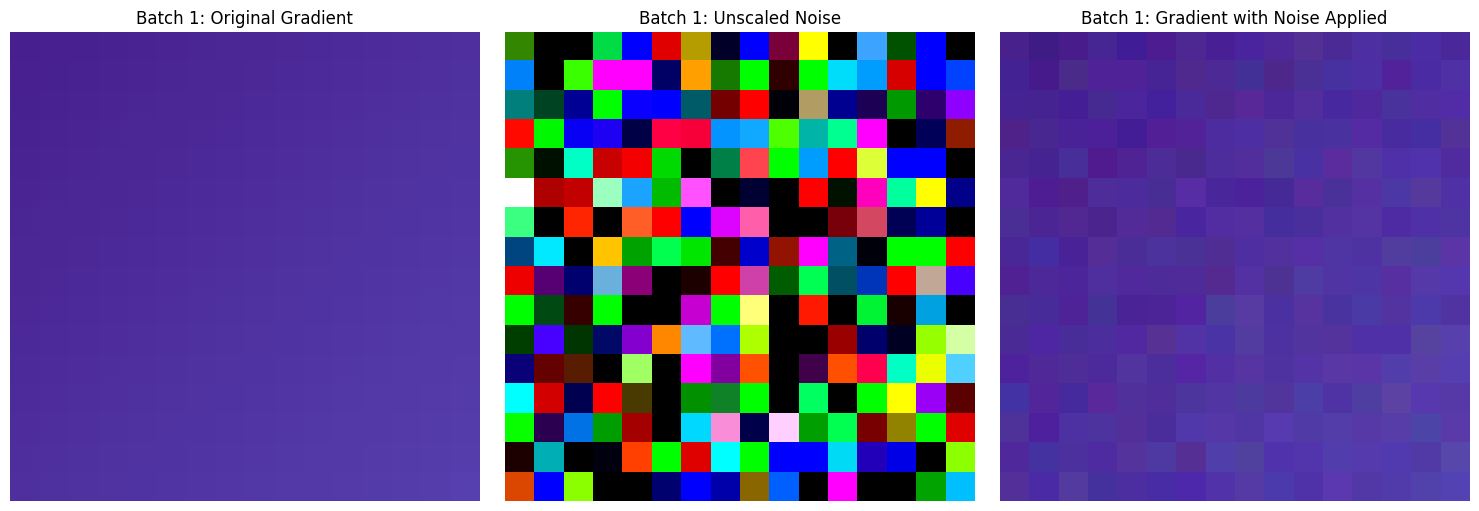
Next, let’s use a batched version of our optimized forward (q) function and our new NoiseSchedule to generate batches of noised images.
def noise_img(
img: t.Tensor, noise_schedule: NoiseSchedule, max_steps: Optional[int] = None
) -> tuple[t.Tensor, t.Tensor, t.Tensor]:
"""
Adds a random number of steps of noise to each image in img.
img: An image tensor of shape (B, C, H, W)
noise_schedule: The NoiseSchedule to follow
max_steps: if provided, only perform the first max_steps of the schedule
Returns a tuple composed of:
num_steps: an int tensor of shape (B,) of the number of steps of noise added to each image
noise: the unscaled, standard Gaussian noise added to each image, a tensor of shape (B, C, H, W)
noised: the final noised image, a tensor of shape (B, C, H, W)
"""
(B, C, H, W) = img.shape
if max_steps is None:
max_steps = len(noise_schedule)
assert len(noise_schedule) >= max_steps
num_steps = t.randint(1, max_steps, size=(B,), device=img.device)
noise = t.randn_like(img)
x_scale = noise_schedule.alpha_bar(num_steps).sqrt()
noise_scale = (1 - noise_schedule.alpha_bar(num_steps)).sqrt()
noised = (
repeat(x_scale, "b -> b c h w", c=C, h=H, w=W) * img
+ repeat(noise_scale, "b -> b c h w", c=C, h=H, w=W) * noise
)
noise_schedule = NoiseSchedule(max_steps=200, device="cpu")
img = gradient_images(2, (3, 16, 16))
(num_steps, noise, noised) = noise_img(normalize_img(img), noise_schedule, max_steps=10)
for i in range(img.shape[0]):
images = t.stack([img[i], noise[i], denormalize_img(noised[i])])
titles = [f"Batch {i}: Original Gradient", f"Batch {i}: Unscaled Noise", f"Batch {i}: Gradient with Noise Applied"]
plot_images(images, titles)
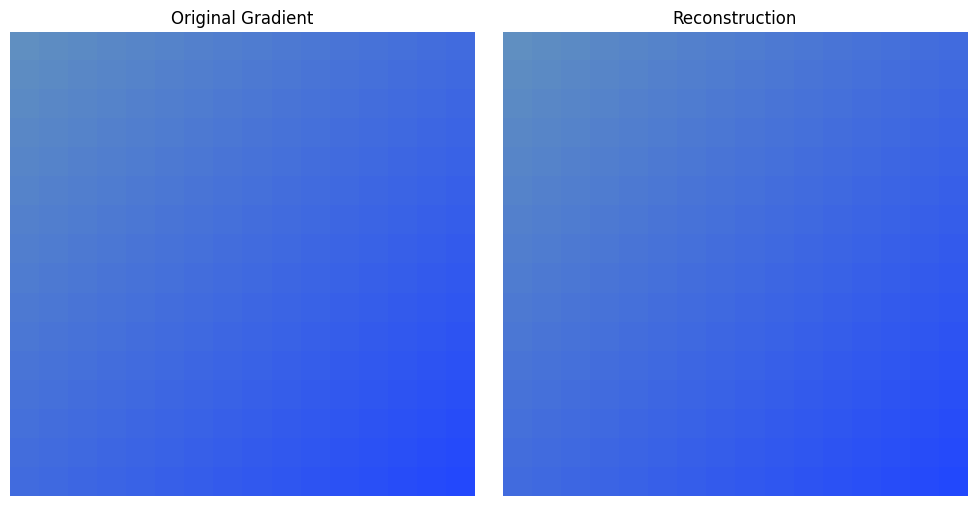
Reconstruct
During training, we will want to reconstruct the image for logging purposes. We will be using the noisy image, the predicted noise, and the noise schedule to try to reconstruct to original image so we can visually see how close the prediction is.
This is the inverse function of the noise_img() function above.
def reconstruct(
noisy_img: t.Tensor,
noise: t.Tensor,
num_steps: t.Tensor,
noise_schedule: NoiseSchedule,
) -> t.Tensor:
"""
Subtract the scaled noise from noisy_img to recover the original image. We'll later use this with the model's output to log reconstructions during training. We'll use a different method to sample images once the model is trained.
Returns img, a tensor with shape (B, C, H, W)
"""
B, C, H, W = noisy_img.shape
x_scale = noise_schedule.alpha_bar(num_steps).sqrt()
noise_scale = (1 - noise_schedule.alpha_bar(num_steps)).sqrt()
img = noisy_img - repeat(noise_scale, "b -> b c h w", c=C, h=H, w=W) * noise
img = img / repeat(x_scale, "b -> b c h w", c=C, h=H, w=W)
assert img.shape == (B, C, H, W)
return img
reconstructed = reconstruct(noised, noise, num_steps, noise_schedule)
denorm = denormalize_img(reconstructed)
plot_images(t.stack([img[0], denorm[0]]), ["Original Gradient", "Reconstruction"])
Toy Diffusion Model Definition
For our model architecture, we will be using a simple two-layer MLP. The original paper uses a U-Net architecture to represent complex and diverse image data structures, but since our dataset has a very simple structure, we can get away with this simple architecture.
The algorithm for the forward pass is:
- Scale down the the number of steps to between [0, 1]
- Convert the images into a 1D vector of length $k = (\text{channel} \times \text{height} \times \text{weight})$ to a $(batch, k)$ vector
- Concatenate the image vectors and the “number of step” vectors to a $(batch, k+1)$ vector
- Apply to a $(k+1, d_model)$ linear transformation to a $(batch, d_{model})$ vector
- Take the Relu actvations
- Apply a final $(d_{model}, k)$ linear transormation to a $(batch, k)$ vector
- Reshape the $(batch, k)$ back into the images dimensions $(batch, channel, height, width)$ representing the prediction of the noise that was added to the original image.
@dataclass(frozen=True)
class ToyDiffuserConfig:
img_shape: tuple[int, ...]
d_model: int
max_steps: int
class ToyDiffuser(nn.Module):
config: ToyDiffuserConfig
img_shape: tuple[int, ...]
noise_schedule: Optional[NoiseSchedule]
max_steps: int
model: nn.Sequential
def __init__(self, config: ToyDiffuserConfig):
"""
A toy diffusion model composed of an MLP (Linear, ReLU, Linear).
"""
super().__init__()
self.config = config
self.img_shape = config.img_shape
self.noise_schedule = None
self.max_steps = config.max_steps
assert len(config.img_shape) == 3
num_pixels = int(reduce(mul, config.img_shape))
self.model = nn.Sequential(
nn.Linear(num_pixels + 1, config.d_model),
nn.ReLU(),
nn.Linear(config.d_model, num_pixels),
Rearrange(
"b (c h w) -> b c h w",
c=config.img_shape[0],
h=config.img_shape[1],
w=config.img_shape[2],
),
)
def forward(self, images: t.Tensor, num_steps: t.Tensor) -> t.Tensor:
"""
Given a batch of images and noise steps applied, attempt to predict the noise that was applied.
images: tensor of shape (B, C, H, W)
num_steps: tensor of shape (B,)
Returns
noise_pred: tensor of shape (B, C, H, W)
"""
B, C, H, W = images.shape
assert num_steps.shape == (B,)
num_steps = num_steps / self.max_steps # Scaling down num_steps to have the range [0, 1]
model_in = t.cat(
(
rearrange(num_steps, "(b 1) -> b 1"),
rearrange(images, "b c h w -> b (c h w)"),
),
dim=-1,
)
out = self.model(model_in)
assert out.shape == (B, C, H, W)
return out
Now, let’s see the noise preduction of our diffusion model without training. It should just be completely random.
img_shape = (3, 5, 5)
n_images = 5
imgs = gradient_images(n_images, img_shape)
n_steps = t.zeros(imgs.size(0))
model_config = ToyDiffuserConfig(img_shape, 16, 100)
model = ToyDiffuser(model_config)
out = model(imgs, n_steps)
plot_images(denormalize_img(out[0]).detach().unsqueeze(0), ["Noise prediction of untrained model"])
Training
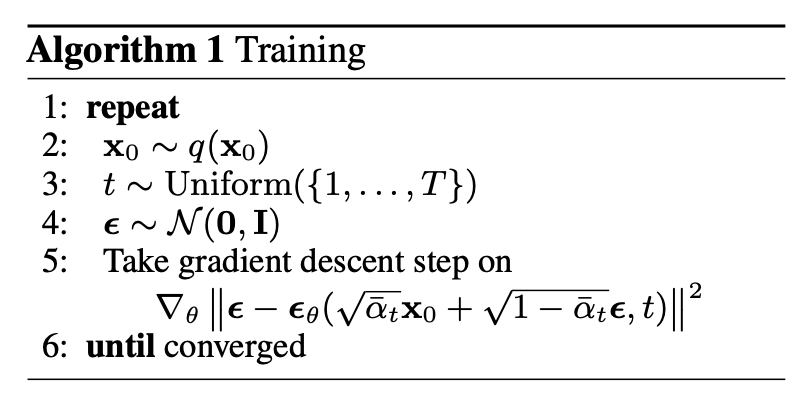
Algorithm 1 in Denoising Diffusion Probabilistic ModelsLine 2 - The $x_0$ is the original training data distrbution,
Line 3 - We need to draw the number of steps of noise to add for each element of the batch, so the $t$ will have shape $(batch,)$ and be an integer tensor. Both 1 and T are inclusive. Each elemenet gets a different numer of steps of noise added.
Line 4 - $\epsilon$ is a sample noise, not sclaed by anything. It’s going to add to the image, so its shape should also be $(batch, channel, height, width)$.
Line 5 - $\epsilon_\theta$ is our neural network. It takes in two arguments: the image with the noise applied in one step of $(batch, channel ,height, width)$, and the number of steps $(batch,)$, normalized to the range $[0,1]$
Line 6 - It is not specified how we know if the network is convered so we are just going to keep going until the loss seems to stop decreasing.

Equation 3 in Denoising Diffusion Probabilistic Models
Equation 14 in Denoising Diffusion Probabilistic ModelsIn the paper, the author describes two loss functions: the variation lower bound (Equation 3) or the mean squared error (Equation 14). In our implementation, we will be using the mean squared error (MSE) since it is easier to implement, more stable during training, requires fewer compute resources, and we have only training a simple network.
def train(
model: ToyDiffuser,
config_dict: dict[str, Any],
trainset: TensorDataset,
testset: Optional[TensorDataset] = None,
) -> ToyDiffuser:
wandb.init(project="diffusion_models", config=config_dict, mode="online" if config_dict["enable_wandb"] else "disabled")
config = wandb.config
print(f"Training with config: {config}")
schedule = NoiseSchedule(config.max_steps, config.device)
model.noise_schedule = schedule
model.train()
optimizer = t.optim.Adam(model.parameters(), lr=config.lr)
train_loader = DataLoader(trainset, batch_size=config.batch_size, shuffle=True)
if testset is not None:
test_loader = DataLoader(testset, batch_size=config.batch_size)
start_time = time.time()
examples_seen = 0
for epoch in range(config.epochs):
# for every img in the training set
for i, (x,) in enumerate(tqdm(train_loader, desc=f"Epoch {epoch + 1}")):
x = x.to(config.device)
num_steps, noise, noised = noise_img(x, schedule) # add between 1 to max_step iterations of noise to the image
y_hat = model(noised, num_steps) # model tries to predict what the noise was
loss = F.mse_loss(y_hat, noise) # calculate the loss according to the MSE between the predicted noise and actual noise
#
optimizer.zero_grad()
loss.backward()
optimizer.step()
# logging
info: dict[str, Any] = dict(
train_loss=loss,
elapsed=time.time() - start_time,
y_hat_mean=y_hat.mean(),
y_hat_var=y_hat.var(),
noised_mean=noised.mean(),
noised_var=noised.var(),
)
if (i + 1) % config.img_log_interval == 0:
reconstructed = reconstruct(noised, y_hat, num_steps, schedule)
info["images"] = log_images(
img=x,
noised=noised,
noise=noise,
noise_pred=y_hat,
reconstructed=reconstructed,
num_images=config.n_images_to_log,
)
examples_seen += len(x)
wandb.log(info, step=examples_seen)
if testset is not None:
# Calculate evaluation loss for current epoch
losses = []
for i, (x,) in enumerate(tqdm(test_loader, desc=f"Eval for Epoch {epoch + 1}")):
x = x.to(config.device)
num_steps, noise, noised = noise_img(x, schedule)
with t.inference_mode():
y_hat = model(noised, num_steps)
loss = F.mse_loss(y_hat, noise)
losses.append(loss.item())
# logging
eval_info = dict(eval_loss=sum(losses) / len(losses))
wandb.log(eval_info, step=examples_seen)
wandb.finish()
return model
Now let’s train our model!
# wandb config
config: dict[str, Any] = dict(
lr=1e-3,
image_shape=(3, 5, 5),
d_model=128,
epochs=20,
max_steps=100,
batch_size=128,
img_log_interval=200,
n_images_to_log=3,
n_images=50000,
n_eval_images=1000,
device=torch_device,
enable_wandb=False
)
# Generate Training and Test data
images = normalize_img(
gradient_images(
config["n_images"],
config["image_shape"],
)
)
train_set = TensorDataset(images)
images = normalize_img(
gradient_images(
config["n_eval_images"],
config["image_shape"],
)
)
test_set = TensorDataset(images)
# Diffuser configs
model_config = ToyDiffuserConfig(config["image_shape"], config["d_model"], config["max_steps"])
model = ToyDiffuser(model_config).to(config["device"])
# Train
model = train(model, config, train_set, test_set)
Training with config: {'lr': 0.001, 'image_shape': [3, 5, 5], 'd_model': 128, 'epochs': 20, 'max_steps': 100, 'batch_size': 128, 'img_log_interval': 200, 'n_images_to_log': 3, 'n_images': 50000, 'n_eval_images': 1000, 'device': 'cpu', 'enable_wandb': False}
Epoch 1: 100%|██████████| 391/391 [00:00<00:00, 1078.40it/s]
Eval for Epoch 1: 100%|██████████| 8/8 [00:00<00:00, 2125.99it/s]
Epoch 2: 100%|██████████| 391/391 [00:00<00:00, 1773.51it/s]
Eval for Epoch 2: 100%|██████████| 8/8 [00:00<00:00, 2160.48it/s]
Epoch 3: 100%|██████████| 391/391 [00:00<00:00, 1898.64it/s]
Eval for Epoch 3: 100%|██████████| 8/8 [00:00<00:00, 2364.82it/s]
Epoch 4: 100%|██████████| 391/391 [00:00<00:00, 1833.56it/s]
Eval for Epoch 4: 100%|██████████| 8/8 [00:00<00:00, 2501.64it/s]
Epoch 5: 100%|██████████| 391/391 [00:00<00:00, 1866.79it/s]
Eval for Epoch 5: 100%|██████████| 8/8 [00:00<00:00, 2497.72it/s]
Epoch 6: 100%|██████████| 391/391 [00:00<00:00, 1894.10it/s]
Eval for Epoch 6: 100%|██████████| 8/8 [00:00<00:00, 2536.43it/s]
Epoch 7: 100%|██████████| 391/391 [00:00<00:00, 1820.81it/s]
Eval for Epoch 7: 100%|██████████| 8/8 [00:00<00:00, 2321.62it/s]
Epoch 8: 100%|██████████| 391/391 [00:00<00:00, 1812.95it/s]
Eval for Epoch 8: 100%|██████████| 8/8 [00:00<00:00, 2216.13it/s]
Epoch 9: 100%|██████████| 391/391 [00:00<00:00, 1850.20it/s]
Eval for Epoch 9: 100%|██████████| 8/8 [00:00<00:00, 2144.19it/s]
Epoch 10: 100%|██████████| 391/391 [00:00<00:00, 1726.98it/s]
Eval for Epoch 10: 100%|██████████| 8/8 [00:00<00:00, 1988.53it/s]
Epoch 11: 100%|██████████| 391/391 [00:00<00:00, 1843.58it/s]
Eval for Epoch 11: 100%|██████████| 8/8 [00:00<00:00, 2372.34it/s]
Epoch 12: 100%|██████████| 391/391 [00:00<00:00, 1937.58it/s]
Eval for Epoch 12: 100%|██████████| 8/8 [00:00<00:00, 2176.74it/s]
Epoch 13: 100%|██████████| 391/391 [00:00<00:00, 1879.44it/s]
Eval for Epoch 13: 100%|██████████| 8/8 [00:00<00:00, 2098.07it/s]
Epoch 14: 100%|██████████| 391/391 [00:00<00:00, 1823.50it/s]
Eval for Epoch 14: 100%|██████████| 8/8 [00:00<00:00, 2228.49it/s]
Epoch 15: 100%|██████████| 391/391 [00:00<00:00, 1814.96it/s]
Eval for Epoch 15: 100%|██████████| 8/8 [00:00<00:00, 2388.05it/s]
Epoch 16: 100%|██████████| 391/391 [00:00<00:00, 1929.18it/s]
Eval for Epoch 16: 100%|██████████| 8/8 [00:00<00:00, 2444.23it/s]
Epoch 17: 100%|██████████| 391/391 [00:00<00:00, 1933.52it/s]
Eval for Epoch 17: 100%|██████████| 8/8 [00:00<00:00, 2436.07it/s]
Epoch 18: 100%|██████████| 391/391 [00:00<00:00, 1750.25it/s]
Eval for Epoch 18: 100%|██████████| 8/8 [00:00<00:00, 2216.13it/s]
Epoch 19: 100%|██████████| 391/391 [00:00<00:00, 1726.80it/s]
Eval for Epoch 19: 100%|██████████| 8/8 [00:00<00:00, 2460.90it/s]
Epoch 20: 100%|██████████| 391/391 [00:00<00:00, 1876.11it/s]
Eval for Epoch 20: 100%|██████████| 8/8 [00:00<00:00, 2527.45it/s]
https://api.wandb.ai/links/michaelyliu6-none/zm4pnu86
Sampling
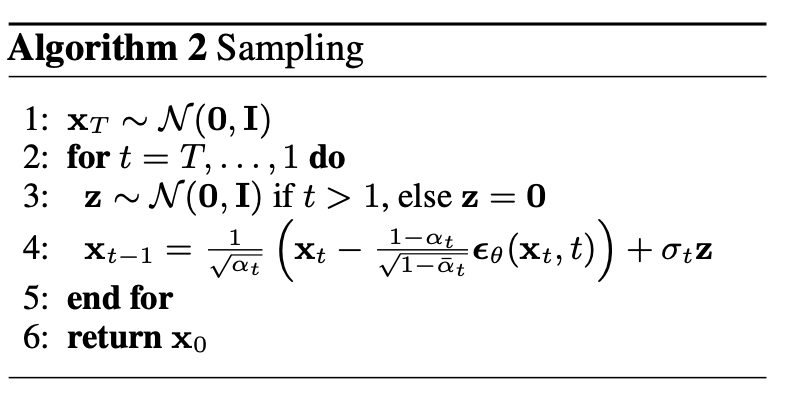
Algorithm 2 in Denoising Diffusion Probabilistic ModelsLine 1 - Start with a sample from a standard Gaussian
Line 2 - Iteratively step backwards towards the original image with no noise
Line 3 - Calculate the denoised image
Line 6 - Return the denoised final image
Ror the early steps (high t), we make big changes since the image is very noisy. At later steps (low t), we make smaller, more precise adjustments as we get closer to the final image.
Note that in Line 3 we are adding a small amount of noise (scaled by $\beta_t$) to maintains the Markov chain properties. However, the release of DDIM (Denoiseing Diffusion Implicit Models) showed that you could remove random noise term during sampling entirely, making the process determinisitc. This led to faster sampling while maintaining good quality. Most interestingly, because DDIM is deterministic, you can smoothly interpolate between two images in the latent space. The intermediate images maintain semantic meaning (e.g., interpolating between a cat and dog image will show meaningful blends of features)
def sample(model: ToyDiffuser, n_samples: int, return_all_steps: bool = False) -> Union[t.Tensor, list[t.Tensor]]:
"""
Sample, following Algorithm 2 in the DDPM paper
model: The trained noise-predictor
n_samples: The number of samples to generate
return_all_steps: if true, return a list of the reconstructed tensors generated at each step, rather than just the final reconstructed image tensor.
out: shape (B, C, H, W), the denoised images
"""
schedule = model.noise_schedule
assert schedule is not None
model.eval()
shape = (n_samples, *model.img_shape)
B, C, H, W = shape
x = t.randn(shape, device=schedule.device) # Line 1: initalize a sample from a standard Gaussian
if return_all_steps:
all_steps = [(x.cpu().clone())]
for step in tqdm(reversed(range(0, len(schedule))), total=len(schedule)): # Line 2
num_steps = t.full((n_samples,), fill_value=step, device=schedule.device)
if step > 0: # Line 3: add a random sample of noise except for the last iteration
sigma = schedule.beta(step)
noise_term = sigma * t.randn_like(x)
else:
noise_term = 0
pred = model(x, num_steps) # predict what the noise add was at $t$
pred_scale = schedule.beta(step) / ((1 - schedule.alpha_bar(step)).sqrt()) # how much do we scale our preidction
denoised_scale = 1 / schedule.alpha(step).sqrt() # adjust for the total time
# Line 4:
# Remove the predicted noise from our current sample
# Scale the results according to the noise level
# add some random noise (except for step 0)
x = denoised_scale * (x - pred_scale * pred) + noise_term
if return_all_steps: # log x at intermediate steps
all_steps.append(x.cpu().clone())
# Line 6: Return final x or all intermediate steps
if return_all_steps:
return all_steps
return x
compiled_model = t.compile(model)
print("Generating images: ")
with t.inference_mode():
samples = sample(compiled_model, 5)
images = [denormalize_img(s).cpu() for s in samples]
plot_images(t.stack(images))
Generating images:
100%|██████████| 100/100 [00:04<00:00, 22.55it/s]

compiled_model = t.compile(model)
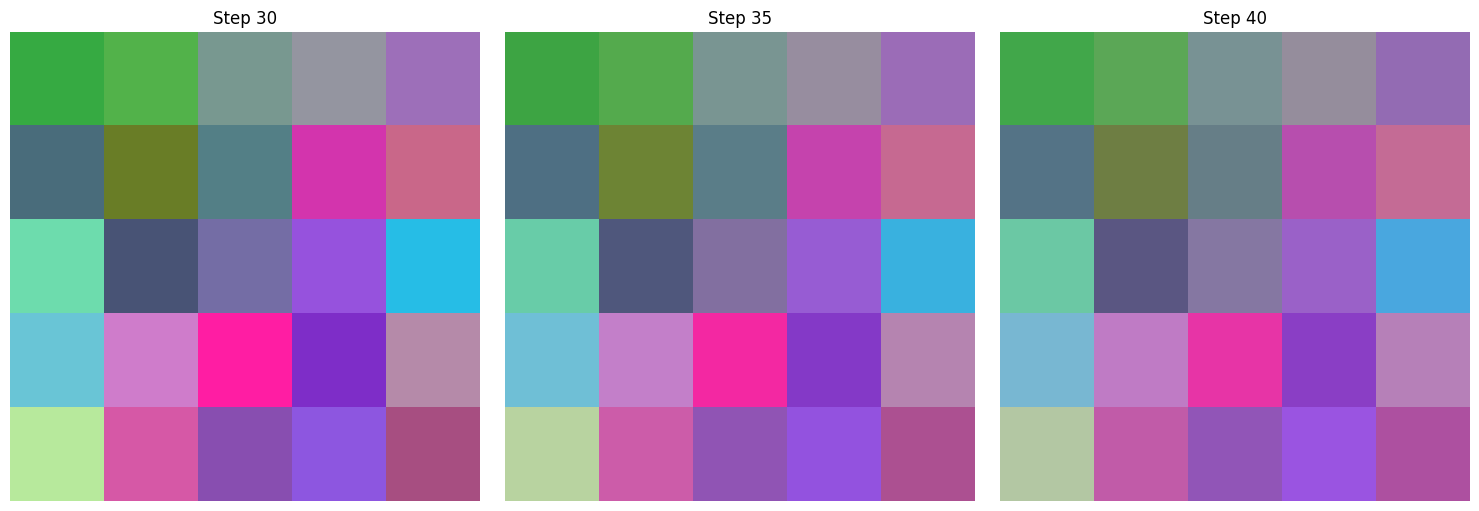
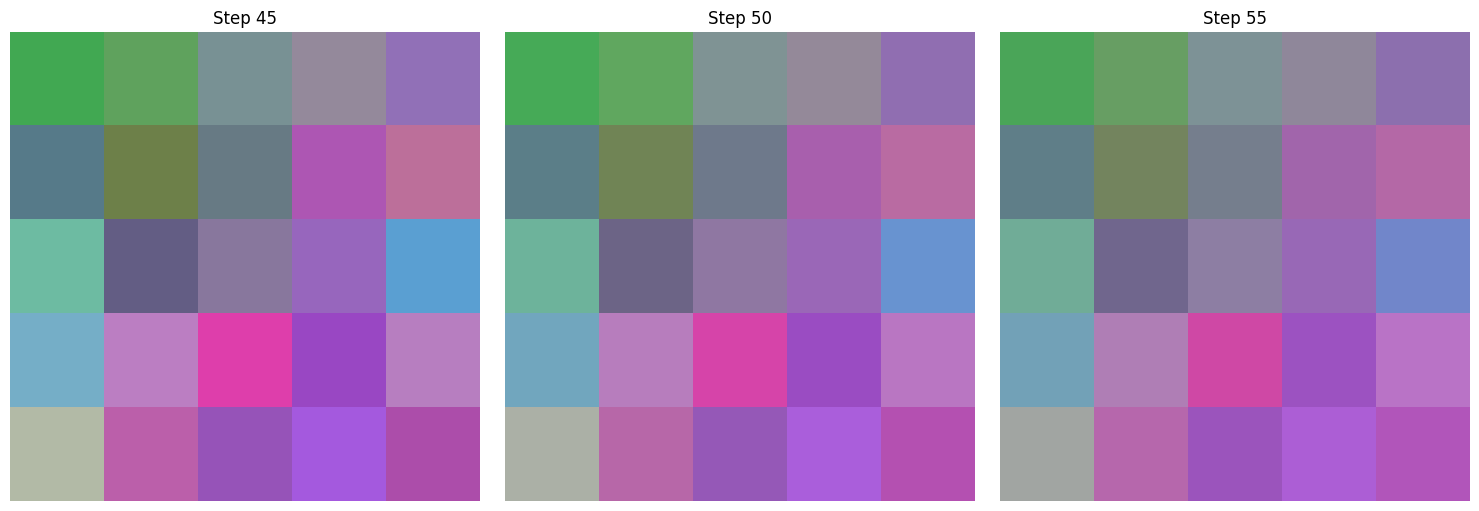
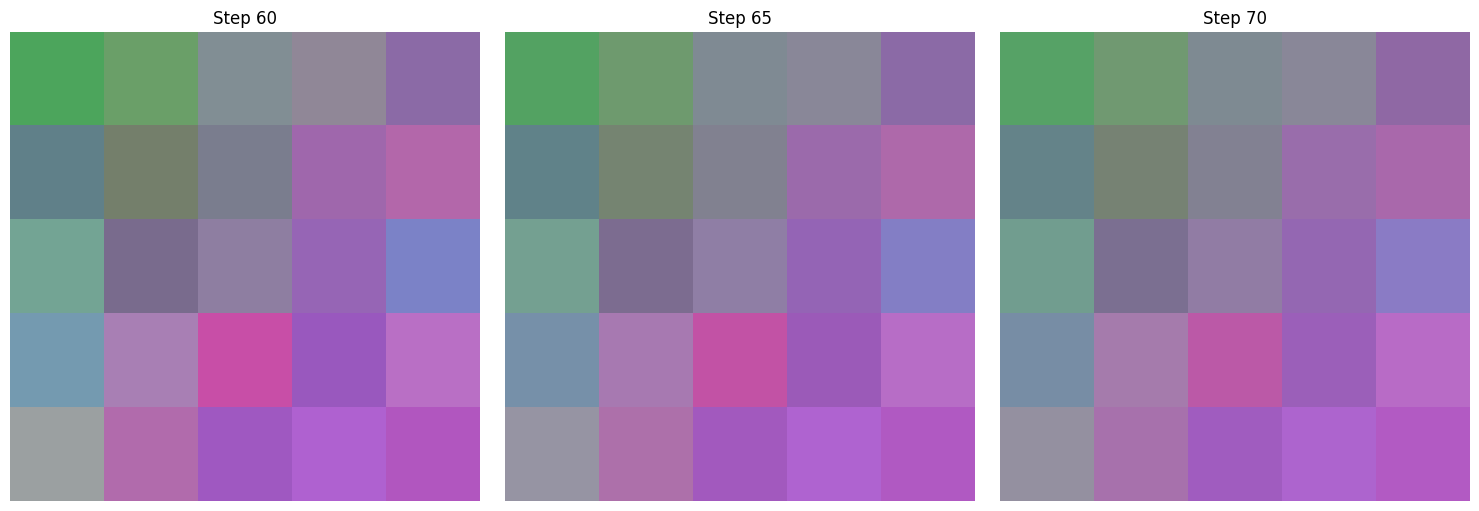
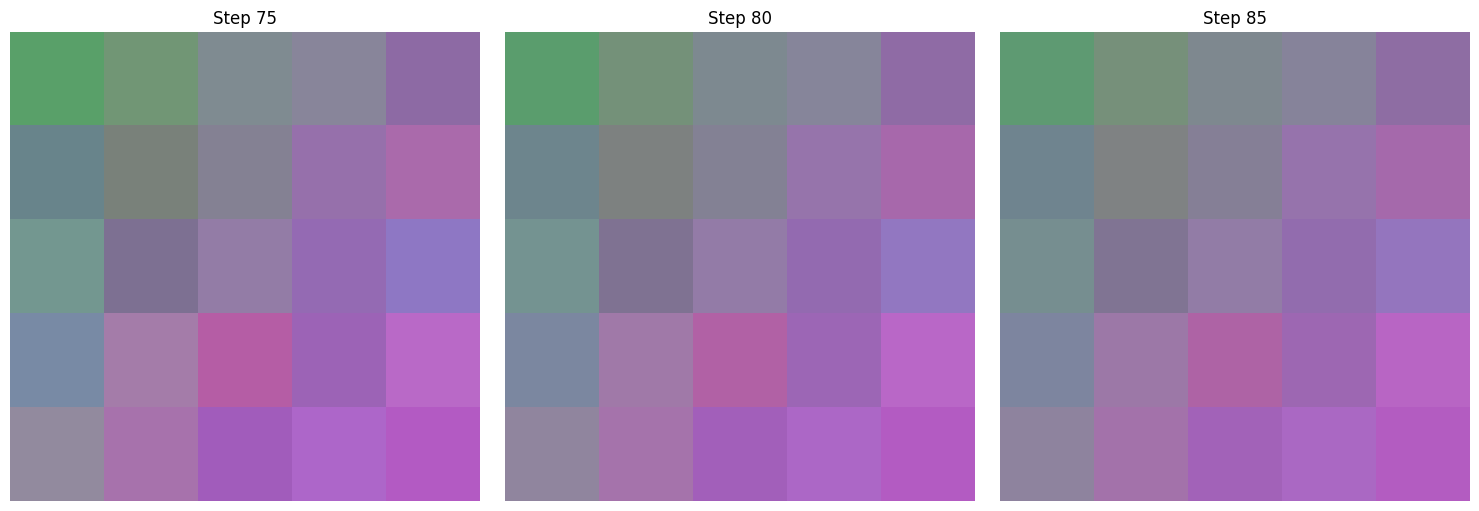
print("Printing sequential denoising")
with t.inference_mode():
samples = sample(model, 1, return_all_steps=True)
images = []
titles = []
for i, s in enumerate(samples):
if i % (len(samples) // 20) == 0:
images.append(denormalize_img(s[0]))
titles.append(f"Step {i}")
if len(images) == 3:
plot_images(t.stack(images), titles)
images = []
titles = []
Printing sequential denoising
100%|██████████| 100/100 [00:00<00:00, 14755.69it/s]